International collaboration
“Embodied AI for Human-Robot Collaborative Task Execution”

28th January 2026

CNRS@CREATE
Create Tower #08-01, 1 Create Way,
138602 Singapore

The PEPR Organic Robotics and PEPR Robotics launched on 28th January a jointly collaboration project with 3 universities in Singapore, called Embodied AI for Human-Robot Collaborative Task Execution.
The CNRS-Singapore “Embodied AI” international project has started on 1st January 2026 for a 4-year term, coordinated by CNRS@CREATE and in collaboration with the National Robotics Programme Singapore (NRP). It involves researchers from PEPR O2R (via the PI2 and AS2 projects) and from PEPR Robotics (via the future AI project).
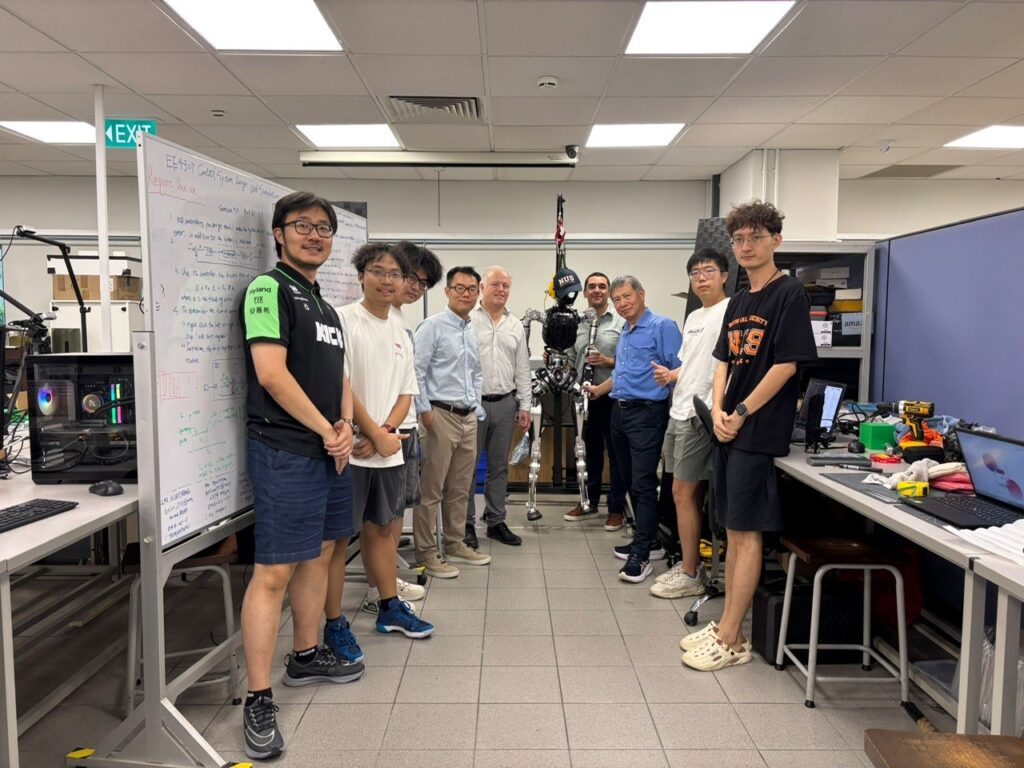
The kick-off meeting was held on January 28, 2026, in Singapore, at the CNRS@CREATE offices, in the presence of Philippe Fraisse, co-director of the PEPR O2R project, and representatives from Singaporean institutional partners and funding bodies, including the NRF (National Research Foundation) and the NRP (National Robotics Programme).
This project brings together several French laboratories, including LIRMM, LAAS, LS2N, and LIRIS, as well as Singaporean research teams from Nanyang Technological University (NTU), the National University of Singapore (NUS), and Singapore Management University (SMU). It falls within the field of artificial intelligence for robotics, with a strong scientific focus on Vision-Language-Action (VLA) approaches, aiming to improve the interaction and autonomy of robotic systems.
Beyond scientific advances, Embodied AI will foster close collaboration between France and Singapore through joint PhD supervision, hosting postdoctoral researchers and regular exchanges of researchers.
This project is organized into four work packages:
- WP1: Generating Multi-Modal Training Data via AI-Enhanced Augmentation, Sensing and Mixed-Reality Elicitation
- WP2: Advanced Robotic Foundation Models
- WP3: AI-Enhanced Techniques for Joint Human-Robot Task Execution
- WP4: Interactive & Collaborative Human-Robot Task Execution
For further information about this international collaboration, please click here.
Other News