Deep materialology:
The manifesto
Emmanuel Ducourneau, member of the AS1 project, Emmanuel Grimaud, co-director of PEPR O2R and coordinator of the House for potential humanities, with the contribution of Yann Philippe Tastevin, published on March 18th in the journal Les Temps Qui Restent the manifesto of “deep materialology”, which lays the foundations for a field that is both theoretical and operational, dedicated to the exploration of technical systems in all their depth.
This approach presents itself as a practice of inquiry and design attentive to the intricacies between biological, physical, and material phenomena, and concerned with understanding the concrete composition of objects, infrastructures, and technical devices. Within the framework of the PEPR O2R and the House for potential humanities, it is applied particularly to the field of robotics.
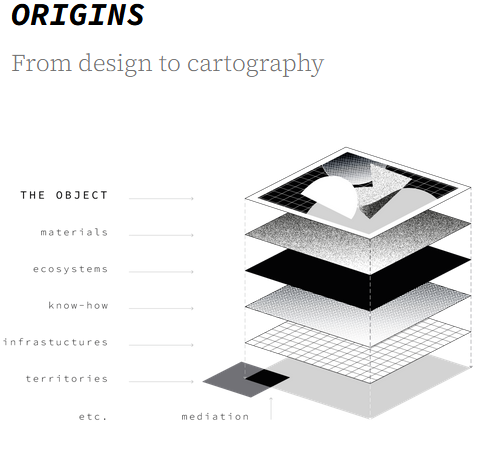
Beyond the technical systems themselves, it is also a matter of uncovering the social, ecological and geopolitical realities they entail: networks of interdependence, critical zones, strategic issues, power relations, etc. The manifesto thus emphasizes the active, unstable and sometimes hostile nature of matter, inviting us to confront its areas of opacity – extreme environments, heavily processed materials, inaccessible industrial settings – in order to renew our relationship with the material world.
To this end, the authors propose a series of “kits” (research, design, teaching, and governance) designed to experiment with new ways of engaging with matter. These tools aim to reorient design and production from a terrestrial and situated perspective, in order to recalibrate design and industrial practices by taking into account the complexity and transformations of matter. The publication is accompanied by an evolving website intended to document this research.
Find out more
Access to the article (only in French) of the journal Les Temps Qui Restent, 18 March 2026
Access to the dedicated web to deep materiology
Other News