The role of tensegrity in the diversity of avian postural stability
Roxane Vimbert, Idriss Pelletan, Mathieu Porez, Anick Abourachid, Christine Chevallereau
Christine Chevallereau, a member of the AS1 project, with the help of Roxane Vimbert, Idriss Pelletan, Mathieu Porez, and Anick Abourachid, is working on a tensegrity system for bipedalism in robotics. Their research has been published in the Journal of the Royal Society Interface.
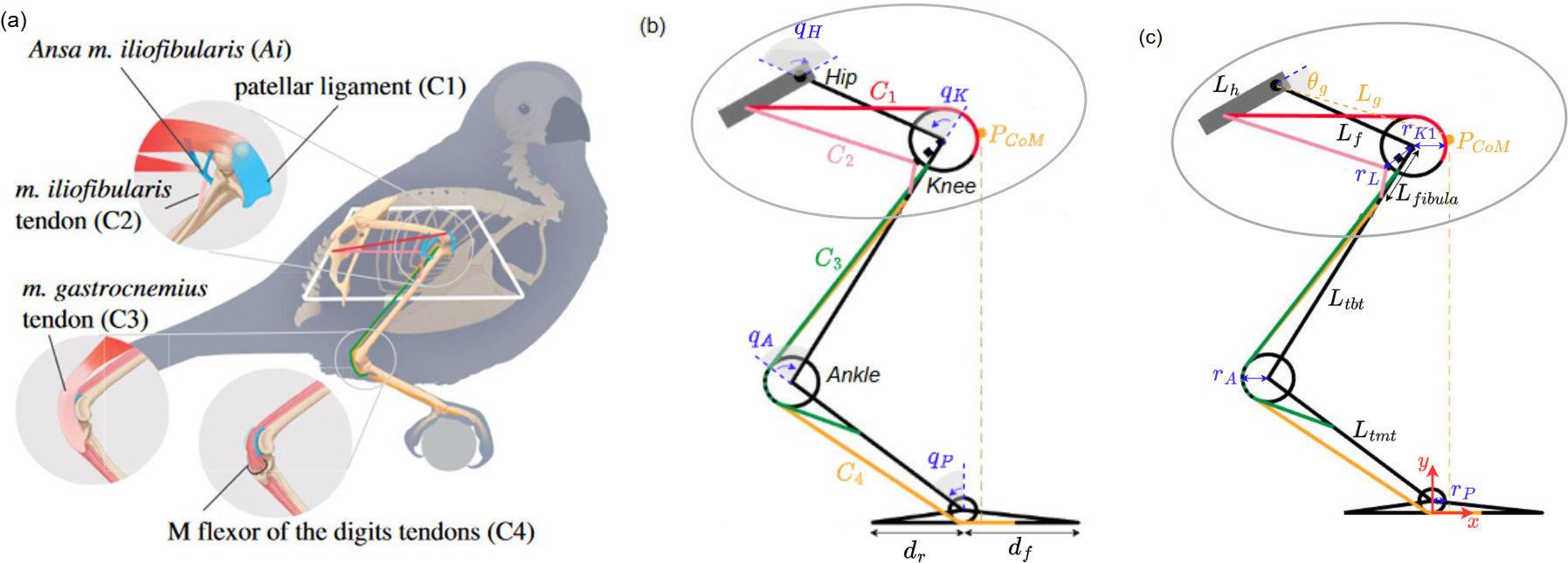
Birds, like humans, adopt a strictly bipedal posture, but with one unique characteristic: their balance is so perfect that they can sleep standing up while expending very little energy. This ability makes them a fascinating model for studying bipedalism in robotics. A recent study examined their balance and postural stability using a tensegrity system (a structure combining rigid elements and tensioned cables).
To test this hypothesis, mathematical models were developed based on anatomical observations of the legs of four bird species (zebra finch, egret, duck, and parrot). These models aimed to explore different configurations and assess whether the passive stability, already demonstrated in previous work, could be generalized.
The results revealed that adding two cables (representing tendons and muscles) allowed the model to be extended to a wide range of configurations. This adaptation notably utilizes the posterior part of the foot, when present. These findings open new perspectives for understanding avian bipedalism and could inspire the design of more stable and autonomous bipedal robots, thanks to optimized passive stability.
Find out more
Roxane Vimbert, Idriss Pelletan, Mathieu Porez, Anick Abourachid, Christine Chevallereau; The role of tensegrity in the diversity of avian postural stability. J R Soc Interface 1 February 2026; 23 (235): 20250631.
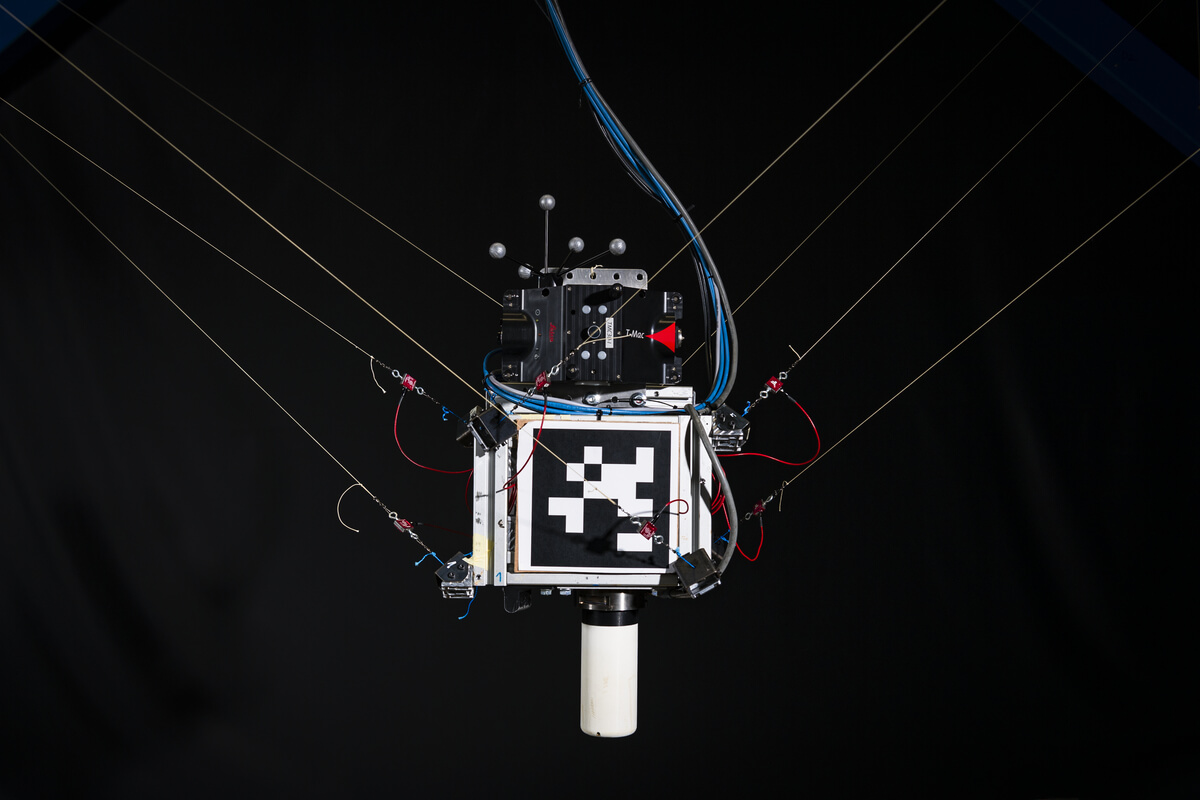
A prototype illustrating this work was presented at the exhibition L’énergie du Vivant from 09/02/2026 to 12/04/2026 at Lumen Gif-sur-Yvette.
More news News