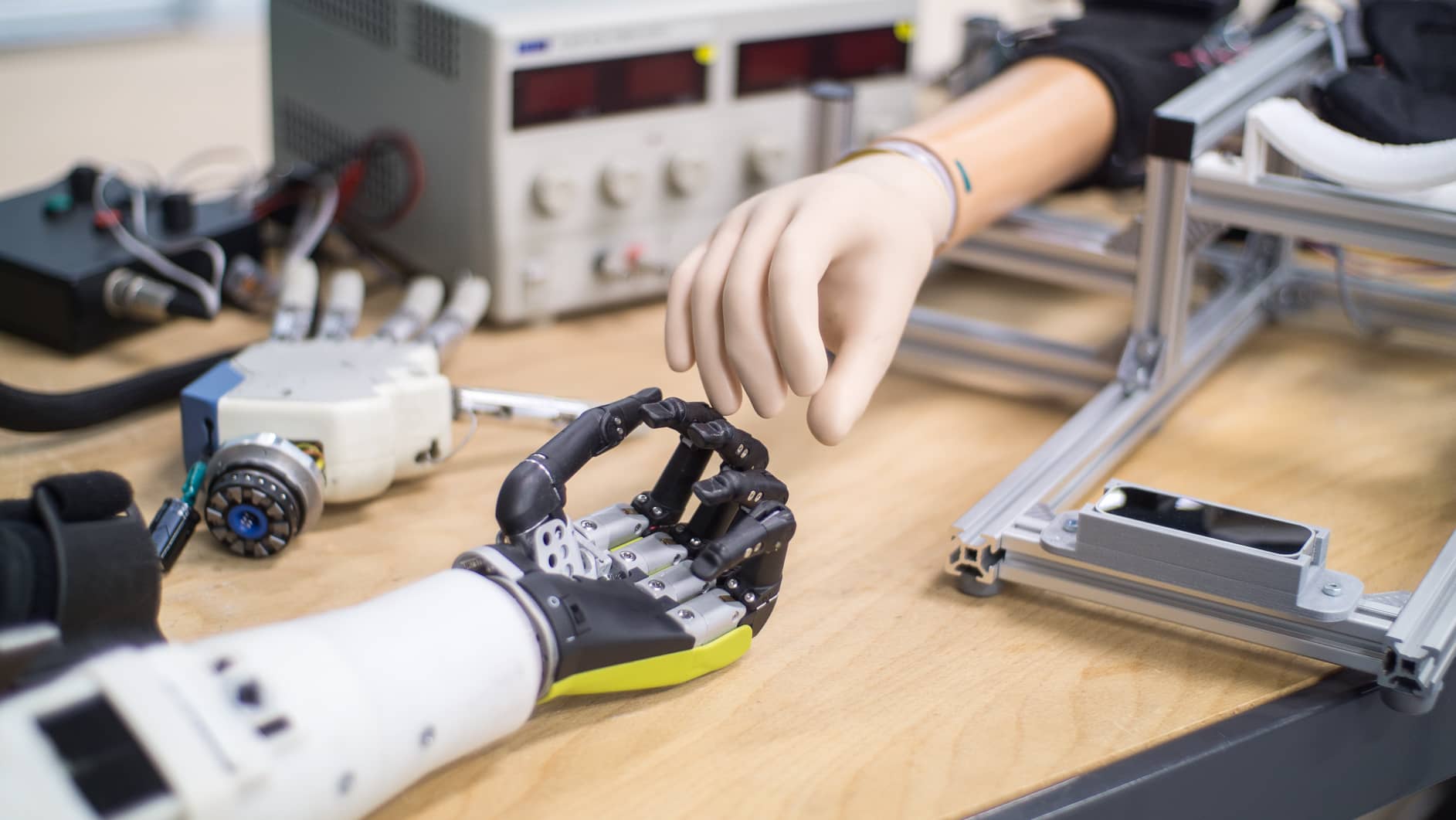
Robotic assistance to human movements
Credits: © Franck Geffard
Coordinator
Franck Geffard, CEA-List research engineer, University of Paris-Saclay
The PI3 integrated project “ASSISTMOV”, comprising a multi-disciplinary team, Engineering and Human and Social Sciences (HSS), targets the use case of robotics to assist the movement of people with disabilities. Through the development of a range of exoskeletons (upper and lower limbs), this project aims to provide a disruptive technology for fluid and robust interaction in a variety of environments and uses (from rehabilitation to daily life). The project will follow the philosophy proposed in the PEPR, which aims to rethink the design of robots from hardware to software, so as to promote social adaptation and inclusion. Centered on a global vision of use in its ecosystem, this innovative approach, integrating HSS, will question the relevance of existing and projected technological orientations, whether in relation to the upper limb or the lower limb.
To this end, ASSISTMOV will challenge the state of the art and propose breakthrough solutions in terms of actuation, structure, control, motion generation, intention detection and environmental perception and understanding. This state of the art is consequential. Although it is well known to the consortium, the focus on users and uses (i.e. trajectories) is desirable to apprehend all the dimensions underlying the diffusion and reception dynamics of a technology within a given society (e.g. ethics, linked to the perceptions of social groups).
The involvement of HSS will enable us to study the life experiences of the direct and indirect beneficiaries of movement assistance. The aim is to take into account the whole ecosystem, the interactions between humans and the material environment, to facilitate the emergence of technical solutions and their appropriation. The aim of these explorations is as much diagnostic as prospective, as they are aimed at analyzing the activities and viewpoints of current users, as well as exploring other opportunities (e.g. design explorations, legal, psycho-social and ethical implications) to feed the thinking of roboticists with elements from the field (e.g. activity repository of existing devices, mapping of real or expected uses, catalog of innovative ideas based on intermediate objects). Several complementary areas of HSS expertise will be mobilized (i.e. anthropological, clinical, design, ethical, psychological, economic), from the emergence of the idea (i.e. posed upstream/beginning of the project by the roboticists) to the design and development of the technical solutions making up the future exoskeletons. SHS involvement will therefore be continuous.
The intervention of HSS will also generate in-situ and, if possible, longitudinal studies of the technological solutions developed by roboticists during the project, in order to answer questions of psychological impact (e.g. feelings of self-efficacy and control), social (e.g. perception of others, transformative effect of technology on activity), anthropological (e.g. human/machine imaginaries and normative frameworks; uses, experiences and body/technology/environment arrangements, comparative exoskeleton/prosthesis analyses explored in PI1), or ecological, ethical and medico-economic aspects.
The objectives of this iterative approach within the ASSISTMOV project are to propose socially adapted robotic demonstrators (Challenge 1) guaranteeing fluid interaction (Challenge 3) based on a hardware and software architecture robust to a variety of environments and uses (Challenge 2).
Keywords: Assistance, mobility, exoskeletons, disability, rehabilitation
Objectives
Informed HSS design of robotic prototypes dedicated to assisting people with significant loss of upper limb mobility
Informed HSS design of robotic prototypes dedicated to assisting people with partial loss of lower limb mobility
Social sciences and humanities-oriented design of technological components concerning, for example, actuation, structure, control, motion generation, intention detection, or even the perception and understanding of the environment
Consortium
CEA
University of Rennes 2
IMT Atlantique Bretagne Pays de la Loire
University of Lumière Lyon 2
University of Artois
University of Paris-Saclay
Sorbonne University
ENSAIT
ENSAM
Inria
INSA
APPROCHE

Establishment of the consortium
Other PEPR projects