Material, architecture and embodied intelligence
Credits: © Felix Vanneste
Coordinator
Pierre Renaud, professor at INSA Strasbourg, RDH team member of ICube laboratory (CNRS/University of Strasbourg)
At a time when the ecological crisis is forcing us to take ever greater account of the different types of life that make up our environments, right down to matter itself, how can we design new forms of robotics that are better adapted to our environments and a vector of “acceptability” and even “desirability”? PEPR’s structuring action 1 “Organic Robotics” proposes to address this issue through a hybrid approach, both from a hardware and a disciplinary point of view, involving alongside engineering and informatics with anthropology, cognitive sciences, art and design, and philosophy.
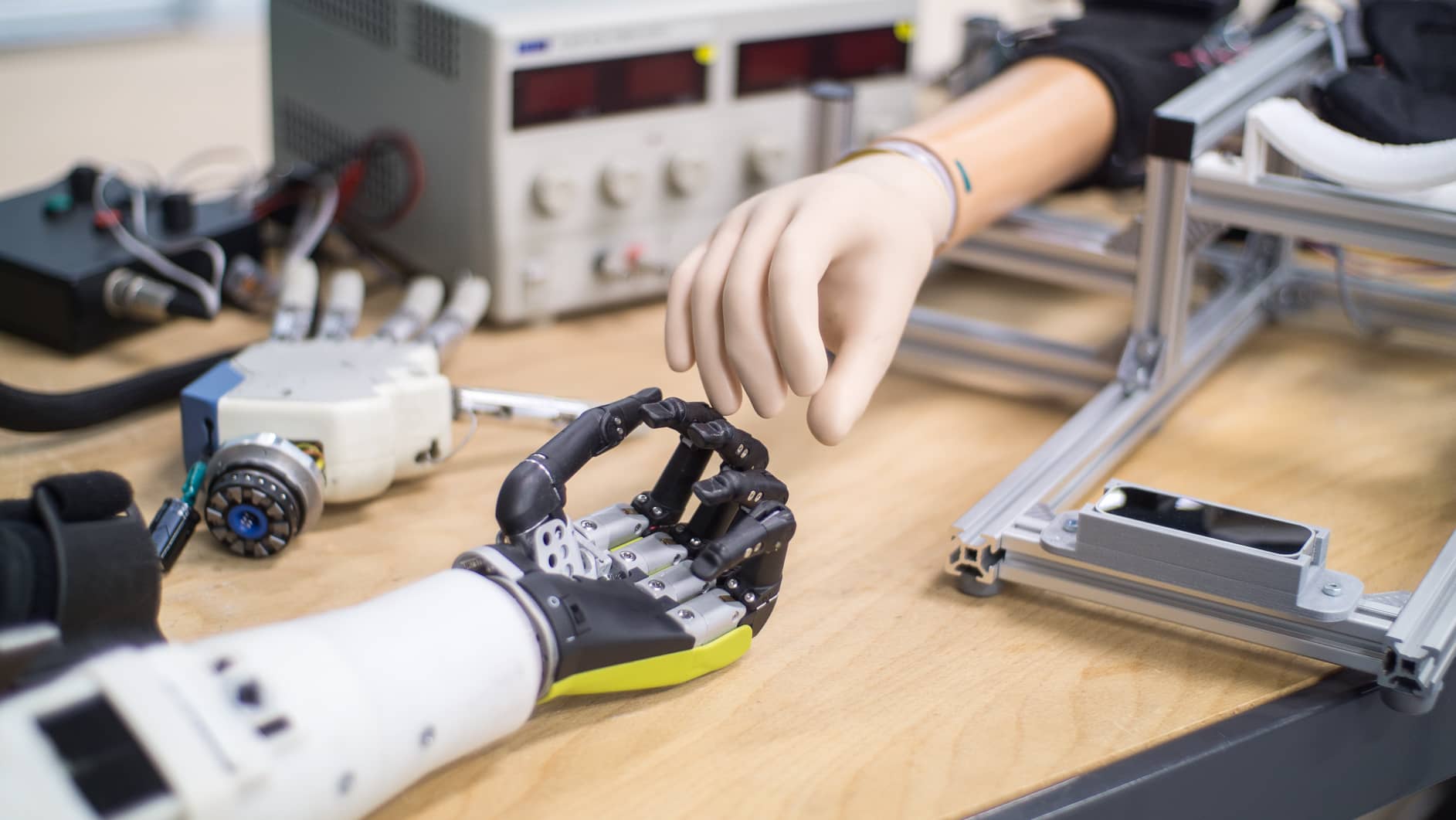
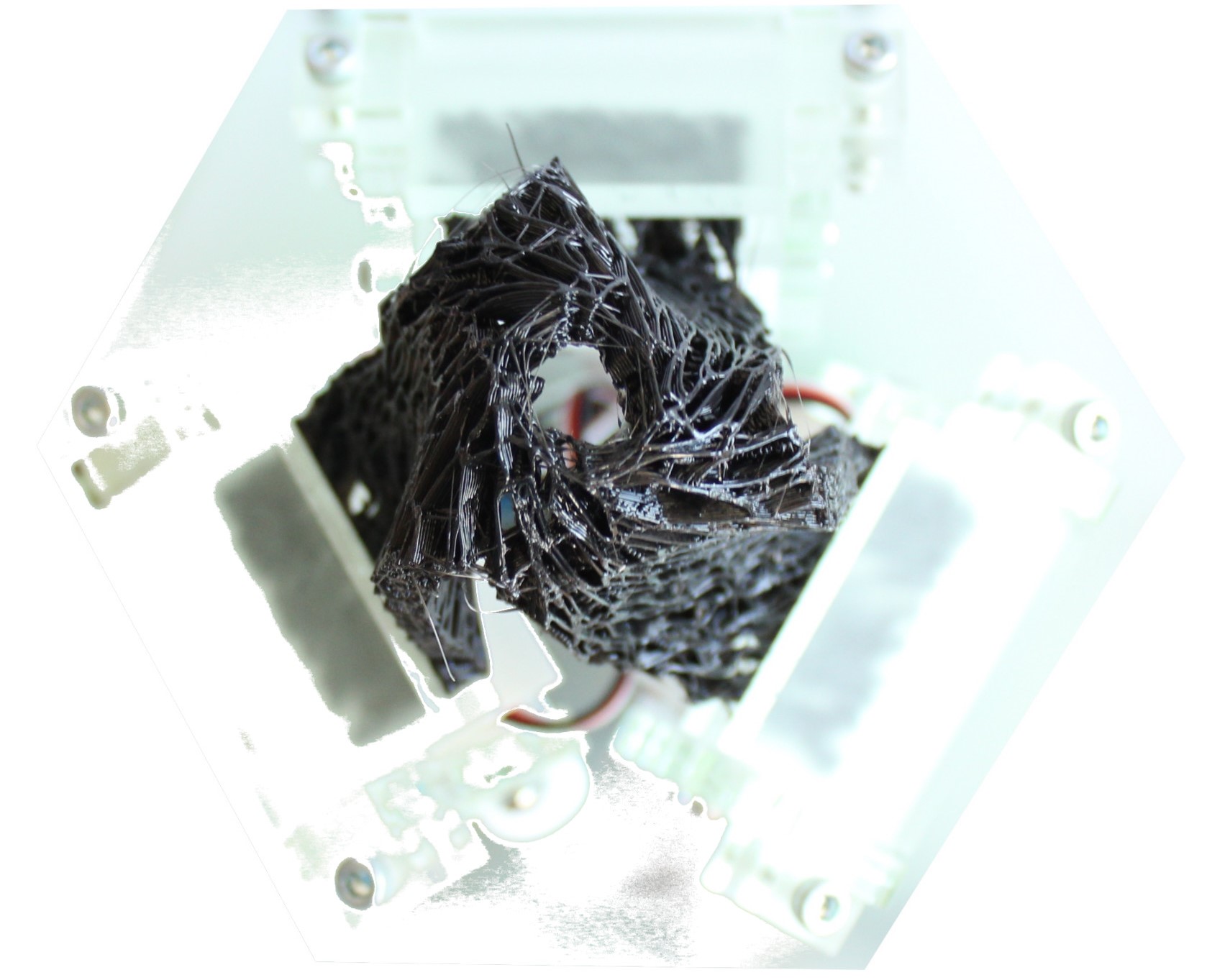
Through the field of manipulation robotics, the work carried out will focus on integrating softness into the robot: in its material for an embodied intelligence, leading to rethink its programming, in its architecture in relation to its control, in the human-robot relationship, and in the composition of the technologies exploited to make it eco-sustainable while preserving its desired characteristics. Several forms of robot will be considered, where the use of softness is introduced materially and software-wise, through material or architecture, notably with soft, continuum robots or tensegrity and hybrid robots.
In this project, softness is seen as a means of rethinking robot design. By working on the question of manipulation in a shared environment, in synchronous or asynchronous human-robot interaction, three temporalities will be considered and articulated:
1- upstream – what material resources can be mobilized, following an eco-design approach;
2- the relationship with the environment, here and now, integrating human-machine interaction in a collaborative perspective;
3- downstream – evolving and sustainable relationships of such a robot with its environment and human on short, medium and long term.
If softness is first understood as a material register. It is, more fundamentally, a way of being in the world. This can then be considered from the point of view of the various disciplines mobilized to constitute a real reason for being, as well as a reason for doing. Indeed, rather than acting on the environment, this softness is more about acting with the environment, better adapting to it to meet the need for acceptability and even desirability of these new forms of robotics, which will be able to take advantage of a long-awaited encorporation, in terms of hardware, software and the environment.
Keywords: Design, material, flexibility, embodied intelligence
Objectives
AS1 project aims to design new forms of robotics more adapted to our environments and a vector of “acceptability” and even “desirability”.
The adopted research approach is hybrid, both from a material and disciplinary point of view, involving alongside engineering and informatics with anthropology, cognitive sciences, art and design and philosophy.
The work carried out focuses on integrating softness into the robot: in its material for an intelligence that is embodied, leading to a rethinking of its programming, in its architecture in relation to its control, in the human-robot relationship, and in the composition of the technologies used to make it eco-sustainable while retaining the desired characteristics.
Consortium
University of Strasbourg
ENSAD
CEA
Inria
CNRS

Establishment of the consortium