Matériau, architecture et intelligence incarnée
Crédit image : © Felix Vanneste
Coordinateur
Pierre Renaud, professeur à l’INSA Strasbourg, membre de l’équipe RDH du laboratoire ICube (CNRS/Université de Strasbourg)
Alors que la crise écologique nous pousse à prendre de plus en plus en compte les différents types de vie qui constituent nos environnements, et cela jusqu’à la matière elle-même, comment concevoir de nouvelles formes de robotique davantage adaptées à nos environnements et vecteur d’“acceptabilité” et même de “désirabilité” ? L’action structurante 1 du PEPR “Robotique organique” propose de répondre à cette problématique grâce à une approche hybride, tant d’un point de vue matériel que disciplinaire, en impliquant aux côtés des sciences de l’ingénieur et de la communication aussi bien anthropologie, sciences cognitives, qu’art et design et philosophie.
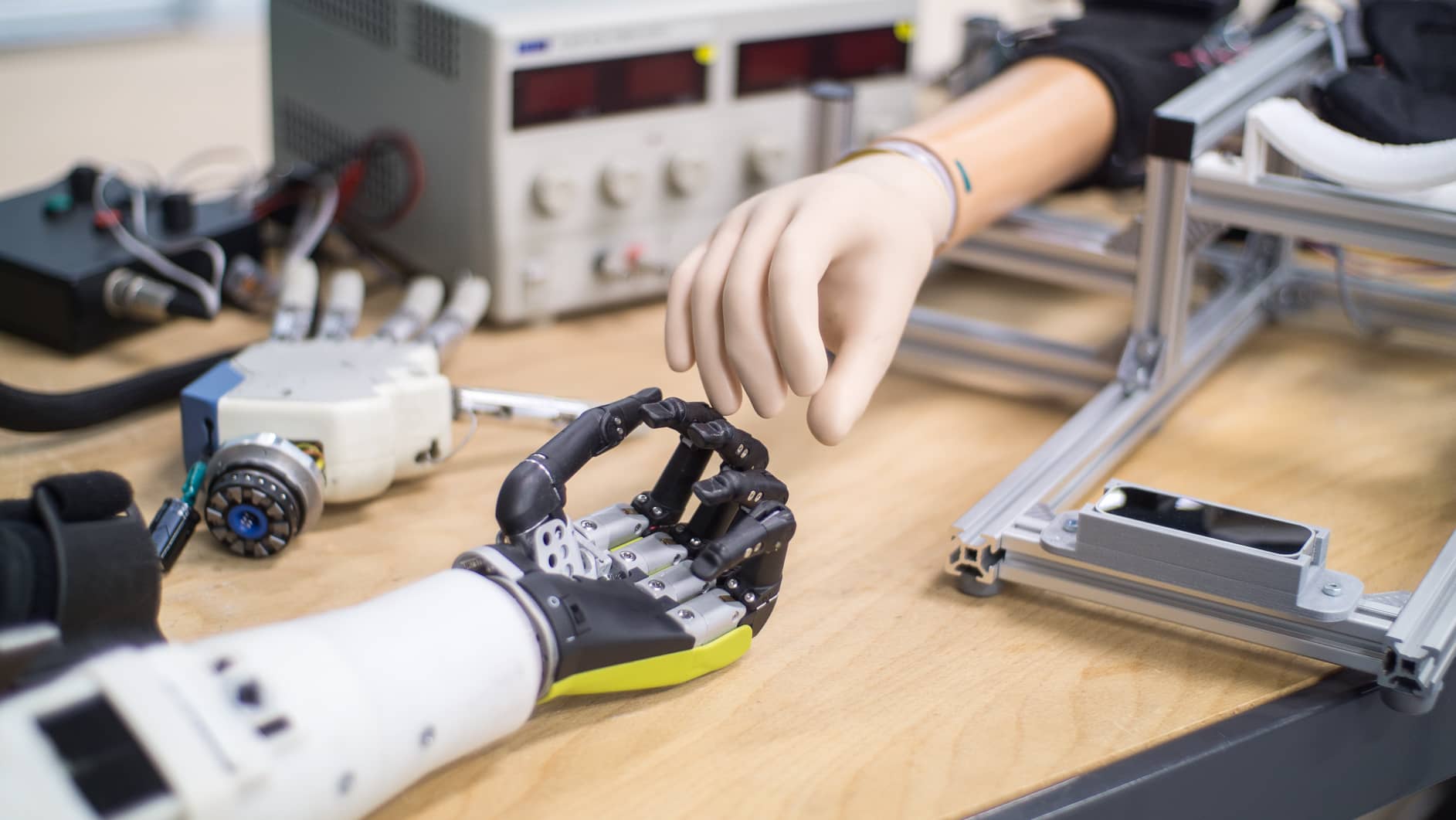
À travers le champ de la robotique de manipulation, les travaux menés s’attacheront à l’intégration de la souplesse dans le robot : dans sa matière pour une intelligence qui soit incarnée, conduisant à repenser sa programmation, dans son architecture en lien avec sa commande, dans la relation humain-robot, et dans la composition des technologies exploitées pour le rendre éco-soutenable tout en conservant les caractéristiques désirées. Plusieurs formes de robots seront considérées, où le recours à la souplesse est introduit matériellement et logiciellement, par les matériaux ou l’architecture, notamment avec des robots souples, continus, ou tensègres ou hybrides.
Dans ce projet, la souplesse est vue comme un moyen de repenser la conception du robot. En travaillant sur la question de la manipulation en lieu partagé, dans une interaction humain-robot synchrone ou asynchrone, ce sont trois temporalités qui seront considérées et articulées :
1- l’amont – quelles ressources matérielles peuvent être mobilisées, suivant une démarche relevant de l’écoconception
2- la relation à l’environnement, ici et maintenant, intégrant l’interaction humain machine dans une perspective collaborative
3- l’aval – quelles relations évolutives et durables d’un tel robot avec leur environnement et l’humain à court, moyen et long terme.
Si la souplesse est d’abord comprise comme un registre matériel, c’est, plus fondamentalement, une façon d’être au monde. Celle-ci peut alors être envisagée du point de vue des différentes disciplines mobilisées pour constituer une véritable raison d’être comme une raison de faire. En effet, plutôt que d’agir sur l’environnement, il s’agit davantage, à travers l’intégration de cette souplesse, d’agir avec l’environnement, de mieux s’y adapter pour répondre à un besoin d’acceptabilité et, même, de désirabilité, de ces nouvelles formes de robotique qui sauront mettre à profit une encorporation tant attendue, aussi bien sur le plan matériel, logiciel qu’environnemental.
Mots-clés : Conception, matériau, souplesse, intelligence incarnée
Les objectifs
L’action structurante 1 du PEPR “Robotique organique” vise à concevoir de nouvelles formes de robotique davantage adaptées à nos environnements et vecteur d’“acceptabilité” et même de “désirabilité”.
L’approche de recherche adoptée est hybride, tant d’un point de vue matériel que disciplinaire, en impliquant aux côtés des sciences de l’ingénieur et de la communication aussi bien anthropologie, sciences cognitives, qu’art et design et philosophie.
Les travaux menés s’attachent à l’intégration de la souplesse dans le robot : dans sa matière pour une intelligence qui soit incarnée, conduisant à repenser sa programmation, dans son architecture en lien avec sa commande, dans la relation humain-robot, et dans la composition des technologies exploitées pour le rendre éco-soutenable tout en conservant les caractéristiques désirées.
Le consortium
Université de Strasbourg
École Nationale Supérieure des Arts Décoratifs
CEA
INRIA
CNRS

Implantation du consortium