Modeling, simulation, multi scale and biomechanics
Credits: © Raphaël de Bengy – Inria
Coordinator
Jeremie Dequidt, professor at Lille University, member of Research Center in Computer Science, Signal and Automatics of Lille (CRIStAL – CNRS/Centrale Lille/University of Lille), teacher-researcher within DEFROST – Deformable team
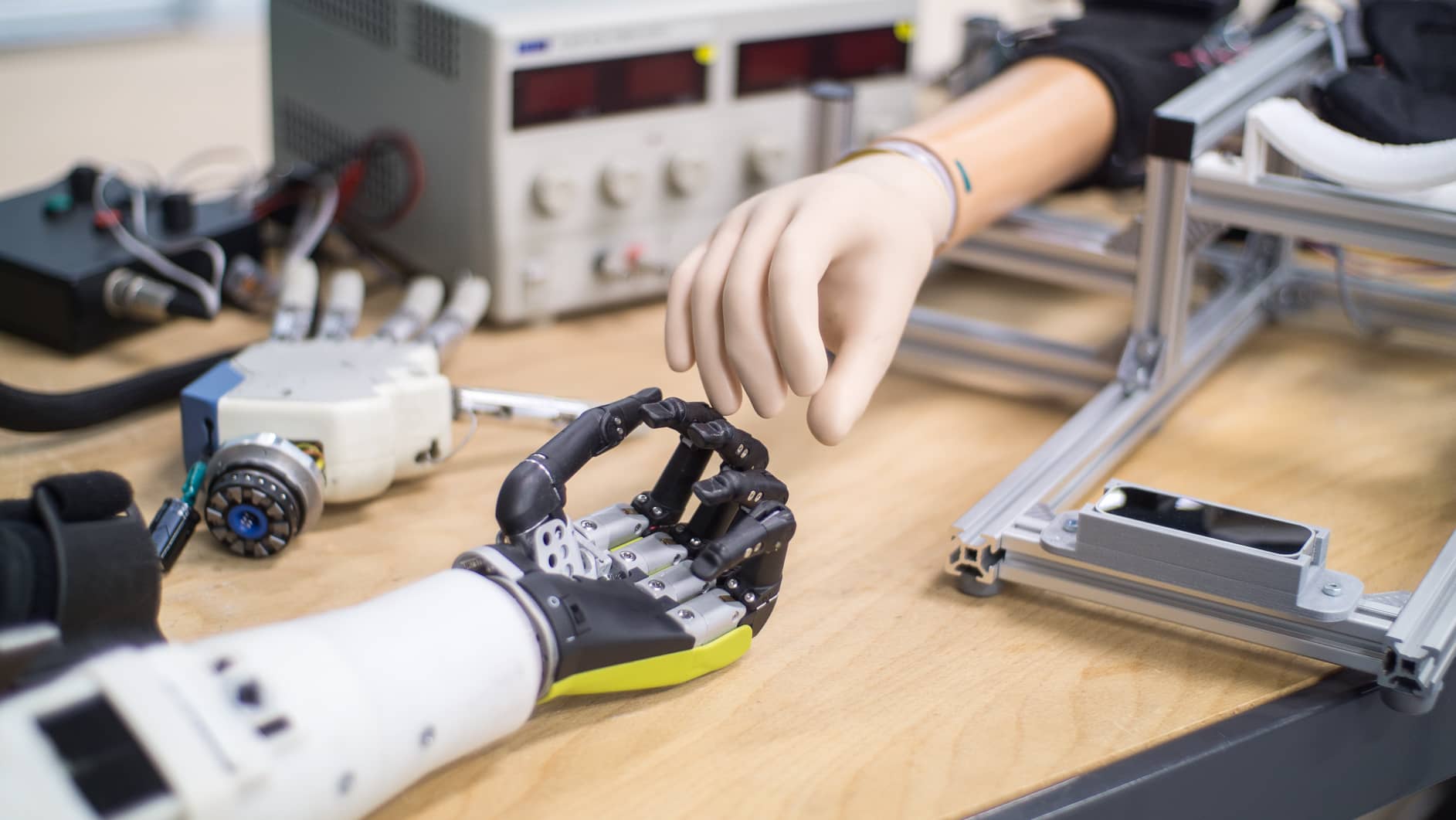
Within the O2R program which aims to promote the research and development of socially adapted robotics, the structuring action AS4 “simulation, multiscale and biomechanics” is positioned in the project as a transversal action whose main objective is to provide new models and new methods for the design, the manufacturing and the control of socially adapted robots. These
robots, which can be assumed to be compliant, i.e. capable of deforming or conforming to its environment, are composed wholly or partially of deformable structures that can potentially be actuated.
These deformable structures have a very important application potential because they allow the reproduction of more realistic, precise and user-adapted phenomena. These deformable structures require new materials, sensors and actuators that are relatively unexplored in robotics research and require a much more complex modeling than in rigid robotics. Similarly, the simulation of these components requires a unified and coupled approach that is both multi-physical (to take into account piezoelectric actuators), multi scale (to accurately capture the various physical phenomena), fast or even real-time.
The outcomes of this structuring action can feed into several other parts of the O2R program: for example the models and simulations can be used in the structuring action AS1 as a tool for design support, in the structuring action AS2 for robot control or in the structuring action AS3 for learning or planning and by extension the 3 integrated projects of the program.
Keywords: Multiscale/multiphysics/biomechanics modeling, numerical simulation, interactions, simulation and robotics imaginaries, digital twins
Objectives
To implement an epistemological and socio-anthropological approach to soft robotics.
To propose methodological and digital tools (software) enabling multi-physical and multi-scale modeling of a compliant robot interacting with their environment.
To implement a “differentiable simulation” to help in the design of robots or interfacing with artificial intelligence methods.
To integrate user interaction with the deformable robot.
Consortium
University of Lille
CEA
Pantheon-Sorbonne University
ENSMM
Mines Telecom Institute
Inria

Establishment of the consortium