Modélisation, simulation, multi-échelle et biomécanique
Crédit image : © Raphaël de Bengy – Inria
Coordinateur
Jeremie Dequidt, professeur à l’Université de Lille, membre du Centre de recherche en informatique, signal et automatique de Lille (CRIStAL – CNRS/Centrale Lille/Université de Lille), enseignant-chercheur au sein de l’équipe DEFROST – Deformable
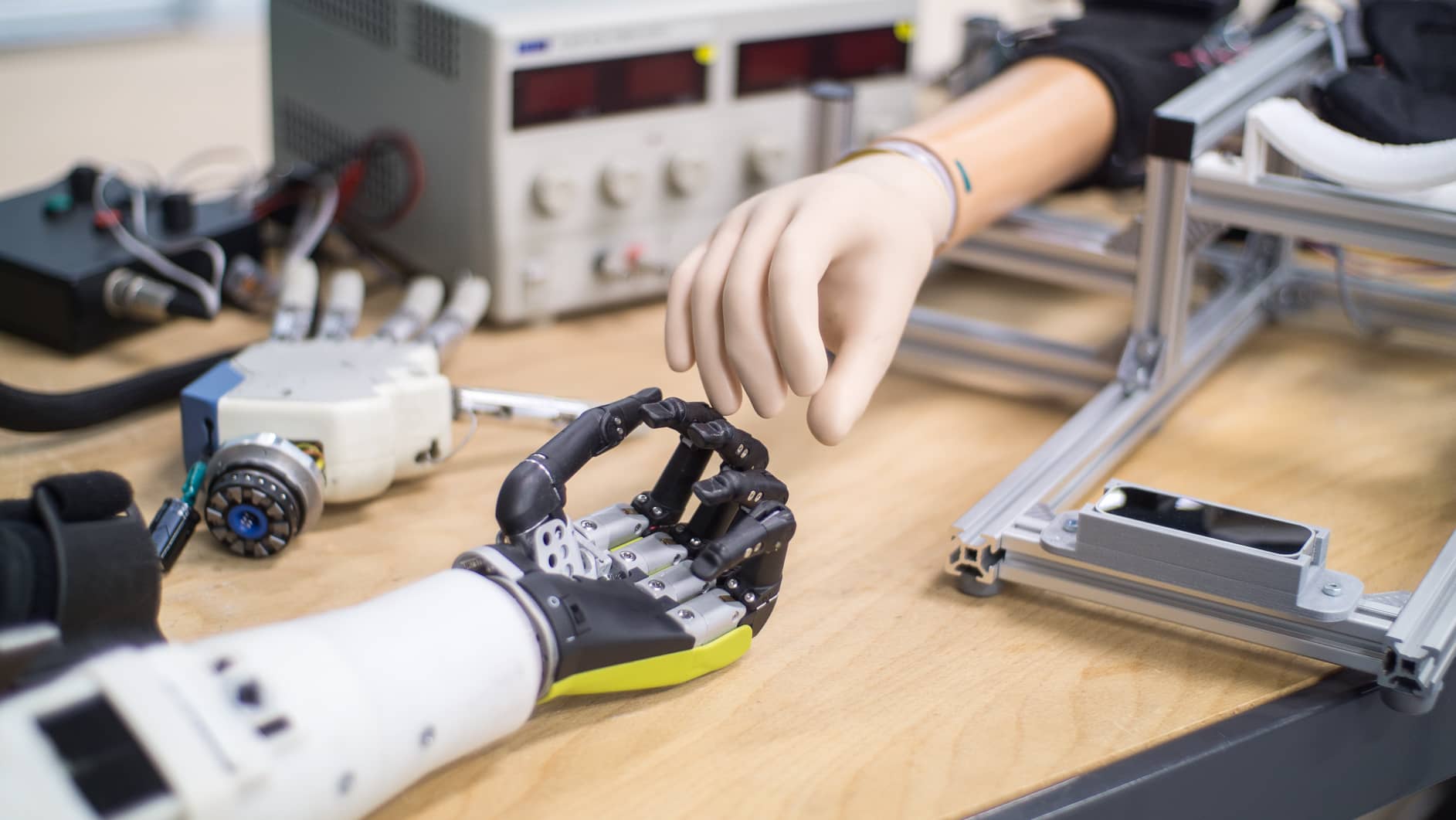
Dans le cadre du programme O2R qui vise à la recherche et au développement de la robotique adaptée socialement, l’action structurante AS4 “Modélisation, simulation, multi–échelle et biomécanique” se positionne dans le projet comme une action transversale ayant pour objectif principal de fournir de nouveaux modèles et de nouvelles méthodes pour la conception, la fabrication et le contrôle de robots socialement adaptés. Ces robots que l’on peut supposer compliants, i.e. capable de se déformer ou de se conformer à leur environnement, sont composés pour tout ou partie de structures déformables potentiellement actionnables.
Ces structures déformables présentent un potentiel d’application très important car elles permettent la reproduction de phénomènes plus réalistes, précis et adaptés à l’utilisateur. Ces structures déformables requièrent des matériaux, des capteurs et des actionneurs récents et relativement peu étudiés dans la recherche en robotique et nécessitent une modélisation beaucoup plus complexe qu’en robotique rigide. De même, la simulation de ces composants imposent d’avoir une approche unifiée et couplée qui soit à la fois multi–physique (pour la prise en compte d’actionneurs piézoélectriques), multi–échelles (pour capturer précisément les différents phénomènes physiques), rapide ou temps–réel.
Les retombées de cette action structurante peut nourrir plusieurs autres partie du programme O2R : par exemple l’utilisation de modèles et de la simulation peut être utilisée dans l’action structurante AS1 comme outil d’aide à la conception, dans l’action structurante AS2 pour le contrôle de robots ou dans l’action structurante AS3 pour l’apprentissage ou la planification et par extension les 3 projets intégrés du programme.
Mots-clés : Modélisation multi-échelles / multiphysique / biomécanique, simulation numérique, interactions, imaginaires de la simulation et de la robotique, jumeaux numériques
Les objectifs
Mettre en œuvre une approche épistémologique et socio-anthropologique de la robotique souple.
Proposer des outils méthodologiques et numériques (logiciels) permettant la modélisation multi-physique et multi-échelle d’un robot compliant en interaction avec son environnement.
Mettre en œuvre une “simulation différentiable” pour l’aide à la conception de robots ou l’interfaçage avec des méthodes d’intelligence artificielle.
Intégrer l’interaction de l’utilisateur avec le robot déformable.
Le consortium
Université de Lille
CEA
Université Paris 1
ENSMM
Institut Mines Telecom
Inria

Implantation du consortium