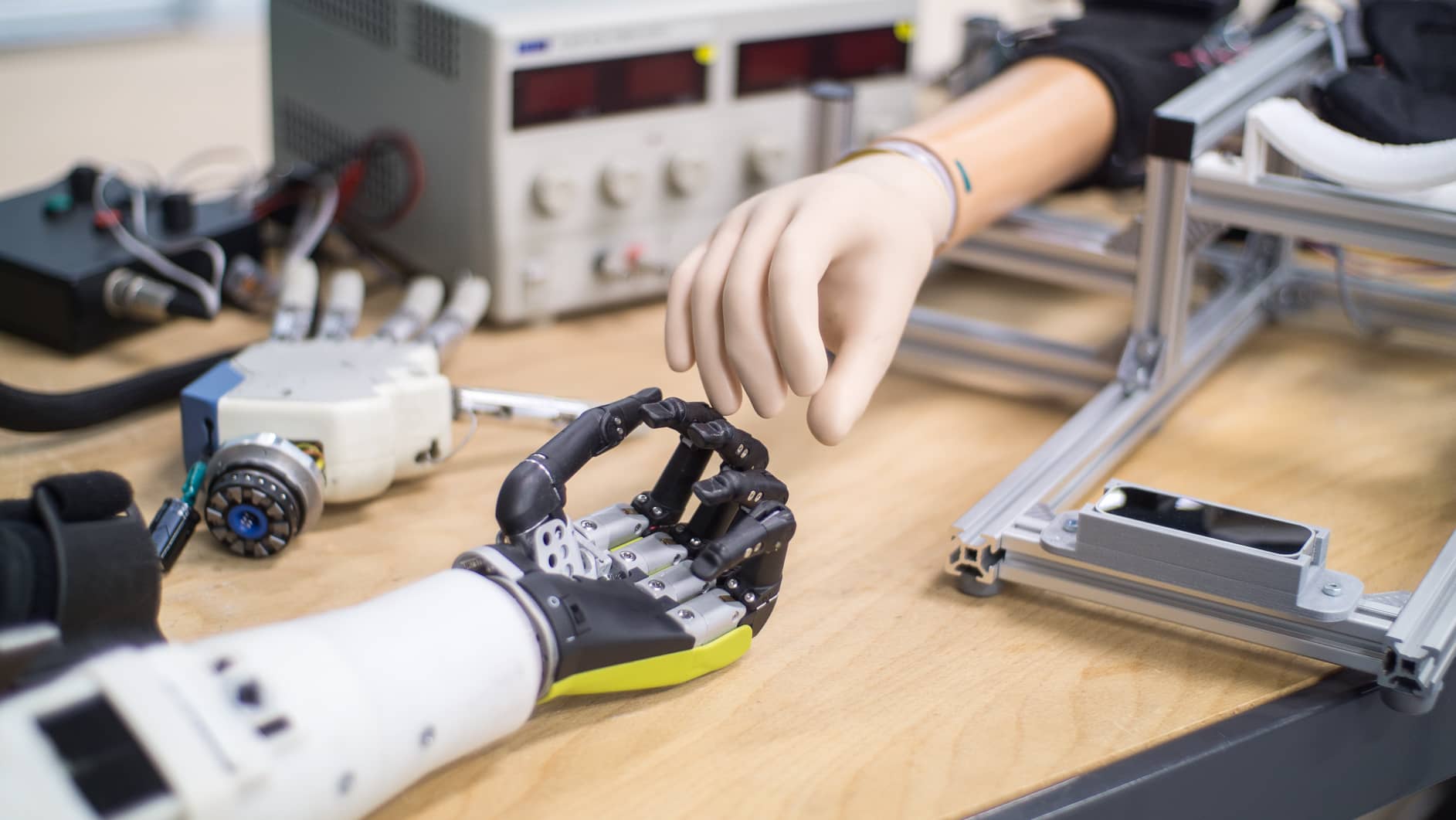
Robot motion with physical interactions and social adaptation
Credits: @ LAAS-CNRS
Coordinator
Vincent Bonnet, professor at University of Toulouse, member at Research laboratory specialized in system analysis and architecture (LAAS-CNRS) and member of the international laboratory CNRS IPAL at National University of Singapore
The objective of this structuring action is to rethink the problem of motion generation of robotic systems by addressing it in its globality and by redefining the research objectives in connection with the Human and Social Sciences.
It aims on the one hand to develop technological solutions, innovative methods and software to provide these new generation robots with advanced planning and control capabilities of their movements and on the other hand to guarantee that the motor actions produced by these systems will be well adapted to humans. These systems will have to be able to interact physically with their environment and with humans to perform a wide panel of tasks ranging from agile locomotion to dexterous manipulation through collaborative tasks.
Among the key objectives linked to these developments, these robots will have to be able to anticipate their movements but also to adapt them to react to unforeseen events and to implement robust control strategies to guarantee the successful execution of tasks and safety for the human. The question of movement autonomy of the machine and sharing of control during collaborative tasks will also be essential with regard to applications and needs. In all cases, it will be necessary to ensure the sustainability of the approaches developed with regard to environmental and societal challenges.
Keywords: Robot Motion, physical interaction, social adaptation, human movement, modeling and control
Objectives
To conduct a multidisciplinary approach based on the study of movement to contribute to the collaborative design of robots. This involves guiding robot design with regard to control performance and engaging users in the movement design itself.
To contribute to modeling and simulating more precisely the dynamics of robotic systems in contact and human biomechanics in order to better understand movements in interaction.
To develop a set of efficient methods for planning and controlling the movement of robotic systems, with a focus on optimal control and statistical learning. This involves developing agile locomotion, dexterous manipulation, and interaction with humans.
To understand human multisensory integration processes and develop the multisensory and sensorimotor integration capabilities of robots in order to better manage the diversity of signals delivered by sensors to control them.
To develop a set of interdisciplinary approaches to understand the relationship between humans and robots from the perspective of movement.
Consortium
CNRS
Inria
University of Montpellier
ONERA
University of Picardie Jules Vernes

Establishment of the consortium