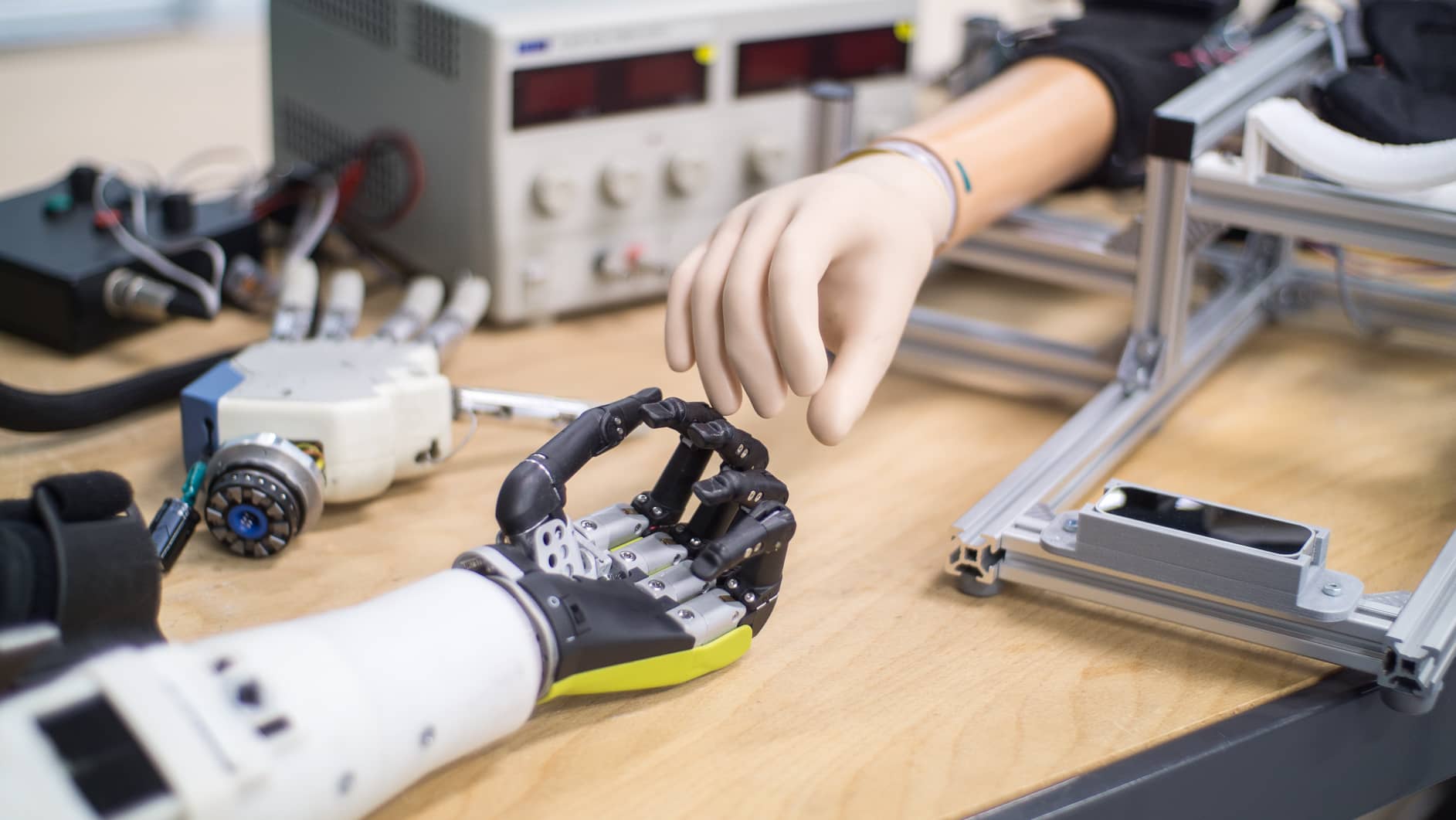
Mouvement en interaction physique et socialement adapté
Crédit image : @ LAAS-CNRS
Coordinateur
Vincent Bonnet, maître de conférences à l’Université de Toulouse, membre du Laboratoire d’analyse et d’architecture des systèmes (LAAS-CNRS) et membre du laboratoire international du CNRS IPAL à la National University of Singapore
L’objectif de cette action structurante est de repenser la problématique de la génération de mouvement des systèmes robotiques en l’abordant dans sa globalité et en redéfinissant les objectifs de recherche en lien avec les sciences humaines et sociales.
Elle vise d’une part à développer des solutions technologies, des méthodes et des logiciels innovants pour conférer à ces robots de nouvelle génération des capacités avancées de planification et de commande de leurs mouvements et d’autre part à garantir que les actions motrices produites par ces systèmes seront bien adaptées à l’humain. Ces systèmes devront être capables d’interagir physiquement avec leur environnement et avec l’humain pour réaliser un large panel de tâche allant de la locomotion agile à la manipulation dextre en passant par la réalisation de tâches collaboratives.
Parmi les objectifs clés liées à ces développements, il s’agira de rendre ces robots capables d’anticiper leurs mouvements mais également de les adapter pour réagir à des évènements imprévus et de mettre en œuvre des stratégies de commandes robustes pour garantir la bonne exécution des tâches et la sécurité de l’humain. La question de l’autonomie du mouvement de la machine et de partage du contrôle lors de tâches collaborative sera également essentielle au regard des applications et des besoins. Dans tous les cas il s’agira de s’assurer de la durabilité des approches développées au regard des défis environnementaux et sociétaux.
Mots-clés : Mouvement robotique, interaction physique, adaptation sociale, mouvement humain, modélisation et contrôle
Les objectifs
Conduire une approche pluridisciplinaire basée sur l’étude du mouvement pour contribuer à la conception collaborative des robots. Il s’agit de guider la conception des robots au regard de la performance de la commande et de mobiliser des usagers dans la conception même du mouvement.
Contribuer à modéliser et simuler plus finement la dynamique des systèmes robotiques au contact et la biomécanique de l’humain afin de mieux appréhender les mouvements en interaction.
Développer un ensemble de méthodes performantes pour planifier et commander le mouvement des systèmes robotiques avec un focus sur la commande optimale et l’apprentissage statistique. Il s’agit de développer la locomotion agile, la manipulation dextre et l’interaction avec des humains.
Comprendre les processus d’intégration multisensorielle humains et développer les capacités d’intégration multisensorielle et sensorimotrice des robots afin de mieux exploiter la diversité des signaux délivrés par les capteurs pour les commander.
Développer un ensemble d’approches interdisciplinaires permettant d’appréhender les rapports entre êtres humains et robots sous l’angle du mouvement.
Le consortium
CNRS
INRIA
Université de Montpellier
Office national d’Etudes et de Recherches Aérospatiales
Université de Picardie Jules Vernes

Implantation du consortium