Les robots parallèles à câbles
Hanbang Gao, Christine Chevallereau, Stéphane Caro
Hanbang Gao, Christine Chevallereau et Stéphane Caro travaillent pour l’amélioration de la sécurité dans les robots parallèles à câbles collaboratifs. Leurs recherches ont été publiées dans la revue IEEE Transactions on Automation Science and Engineering (T-ASE).
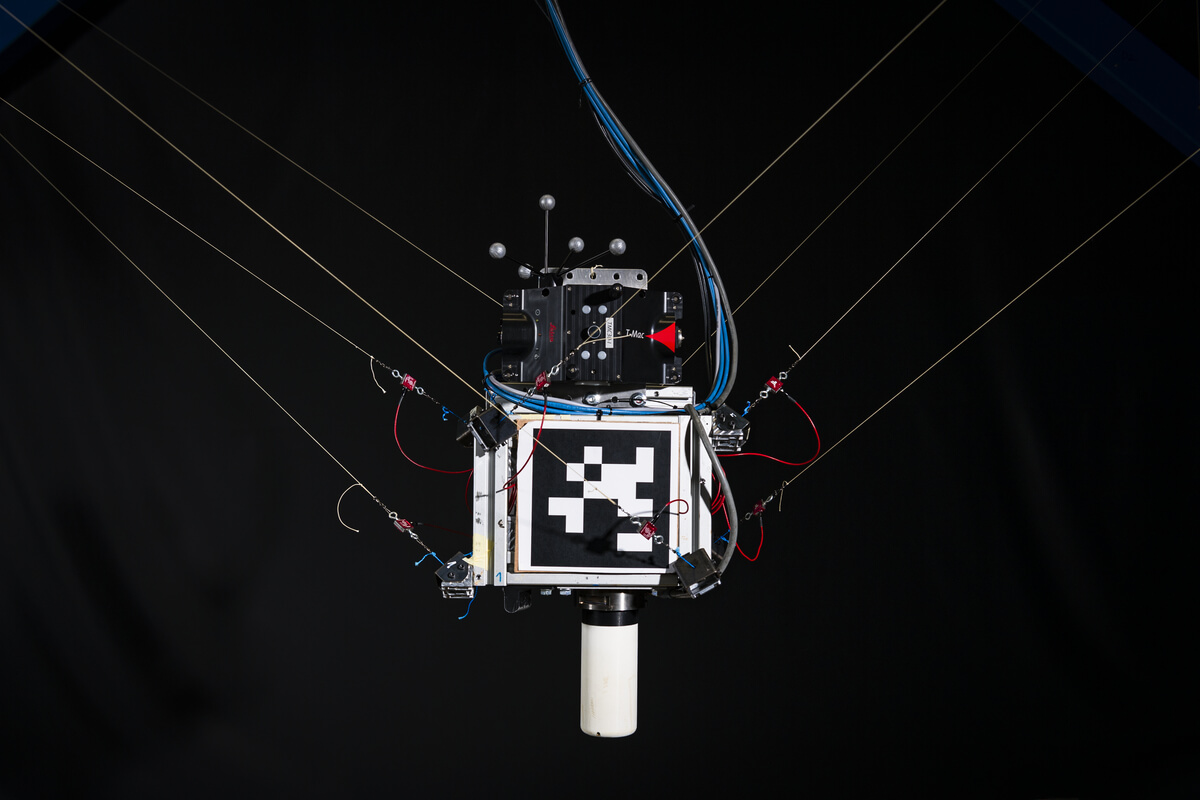
Les robots parallèles à câbles (RPCs) sont utiles pour réaliser plusieurs tâches industrielles (usinage, peinture, portage de colis, etc.), du fait de leur large espace de travail, leur faible masse par rapport à leur charge utile et leur capacité de reconfiguration. Afin d’autoriser la co-activation ou la collaboration robot/humain, les RPCs doivent être conçus pour interagir physiquement avec un opérateur tout en assurant sa sécurité.
Dans ce contexte, le travail réalisé au Laboratoire des sciences du numérique à Nantes (LS2N – CNRS/École centrale de Nantes/Nantes Université) par Hangban Gao, doctorant à l’École centrale de Nantes et membre du LS2N, Christine Chevallereau, directrice de recherche CNRS au LS2N et Stéphane Caro, directeur de recherche CNRS au LS2N, vise a améliorer la sécurité des RPCs collaboratifs à l’aide d’une approche innovante qui consiste en la détection et la classification en temps réel de contacts entre le robot et un opérateur dans le cas d’une application industrielle. Cette approche se décompose en trois étapes : l’estimation des forces externes appliquées sur le robot par la mesure de la tension des câbles, la détection des collisions par analyse spectrale des forces estimées au cours du temps et la classification déterministe du type de contact basé sur une notation pondérée. Les résultats de la validation expérimentale montrent que la méthode est hautement fiable avec seulement 9 échecs sur les 320 essais.
En savoir plus
Hanbang Gao, Christine Chevallereau, Stéphane Caro. Enhancing Safety in Collaborative Cable-Driven Parallel Robots: Contact Distinction and Management for Carrying Tasks. IEEE Transactions on Automation Science and Engineering, In press, ⟨10.1109/TASE.2025.3589966⟩.
Other Actualités