News

Group-Robot Interaction in the Wild
Elisabetta Zibetti, Raphael Lorenzo, Joffrey Becker, Bertrand Luvison and Serena Ivaldi, HSS and robotics members of the AS3 project, with the help of Julien Wacquez and Fabio Amadio, are working on how groups (vs. individuals) engage with a service robot in the real world. Their research has been published in the HRI Companion '26.
See more
“Do robots have a race problem?”
Lionel Obadia, member of AS3 "Decision, learning and social interaction", as well as international scholars in robotics have been interviewed about new studies suggesting that people project human racial biases onto the humanoid robots.
See more
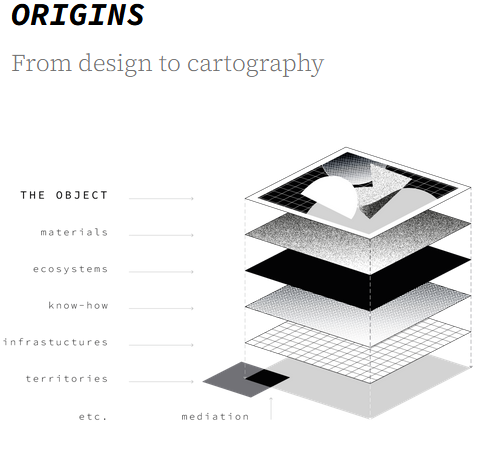
The manifesto of “deep materiology”
Emmanuel Ducourneau, AS1 member, Emmanuel Grimaud, co-director of PEPR O2R et coordinator of the House for potential humanities, with the contribution of Yann Philippe Tastevin, published in the journal Les Temps Qui Restent the manifesto of "deep materiology", which lays the foundations for a field that is both theoretical and operational, dedicated to the exploration of technical systems in all their depth.
See more