Vers des interactions fluides
entre robots et humain

L’interaction sociale ne se limite pas à un simple échange d’informations entre partenaires. Elle repose sur une adaptation réciproque des différentes parties. Dans cette perspective, les robots sociaux doivent ainsi être capables d’intégrer et de gérer cette dynamique, dans laquelle le robot adapte ses réponses aux signaux humains, tandis que l’humain ajuste son comportement aux expressions du robot.
Deux scientifiques membres du projet ciblé AS3 – Décision, apprentissage et interaction sociale ont exploré ces deux facettes complémentaires de cette dynamique dans deux travaux présentés à deux conférences internationales, ICDL 2025 et RO-MAN 2025. La première publication propose un modèle bio-inspiré qui utilise le toucher comme régulateur du stress, un « substrat hormonal » artificiel permettant au robot de s’adapter de manière flexible. La seconde explore comment les expressions émotionnelles d’un robot peuvent influencer les comportements des enfants, mettant en évidence le rôle crucial de la communication affective dans l’instauration d’interactions significatives.
Robots émotionnellement expressifs : implications pour le comportement des enfants à l’égard du robot
Que signifie pour un enfant « répondre » à l’émotion exprimé par un robot ? Les robots de service, avec visage et gestes, sont perçus comme des partenaires sociaux : un sourire, une posture ou un regard transmettent des messages affectifs sans paroles. En psychologie, l’émotion n’est pas seulement un état interne : c’est aussi un signal social qui valide ou désapprouve et oriente nos décisions. Dans une étude pilote à l’école (22 enfants de 6 à 11 ans) avec le robot QT, l’équipe de scientifiques a observé que les enfants lors d’une interaction à valence collaborative avec un robot expressif ajustent spontanément leurs choix à « l’humeur » du robot : ils gardent leur choix lorsque le robot exprime la joie et la changent lorsqu’il affiche de la tristesse. Ils ont noté que renforcer l’expressivité par le visage et le corps corps n’a pas augmenté l’alignement à l’émotion exprimée par les robots. En prospective, ces indices non verbaux pourraient nudger avec tact par exemple à l’école (« bravo c’est bien, continue », « ce n’est pas correct ») au restaurant (« patiente », « choisi un menu plus sain »). Cependant, ce pouvoir persuasif exige des garde-fous pour éviter manipulation et pression sociale.
L’apport de cette étude interdisciplinaire entre psychologie et robotique de service est ici double : celui de démêler les ressorts (empathie, conformité, désir de plaire) des enfants à l’égard de robots et de co-concevoir des robots transparents sur leurs intentions avec un esprit critique à l’égard des situations et des publics. L’approche défendu est celui d’une posture critique et éclairée à regard de l’introduction de robots expressifs et autonomes dans des contexte du quotidien (restaurant, école, hôpital) sans franchir la ligne de l’influence indue. Ce qui soulève de questions éthiques évidentes à l’égard de l’introduction des robots dans notre société.
Elisabetta Zibetti, Maîtresse de conférences en psychologie cognitive à l’université Paris 8, a présenté ces résultats lors de la conférence RO-MAN 2025 à Eindhoven, ⟨hal-05281772⟩
Le toucher comme modérateur du stress : un modèle de robot bio-inspiré, fondé sur la régulation hormonale, pour des interactions sociales adaptatives
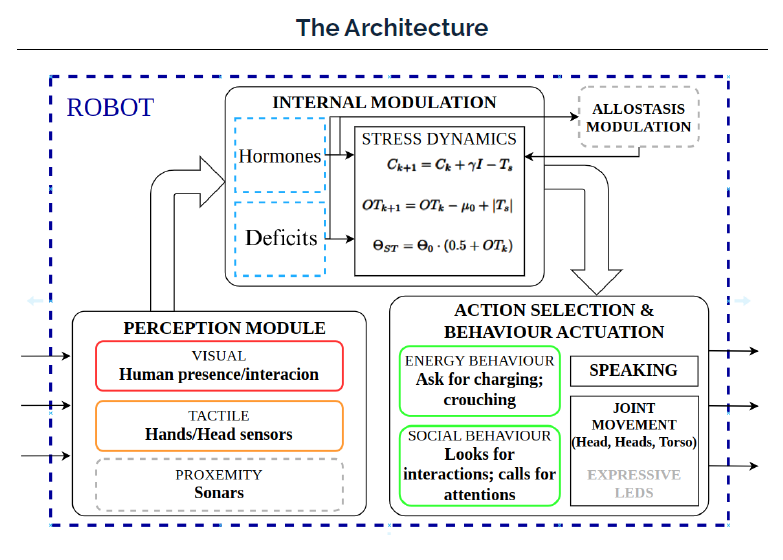
Le stress influence fortement la manière d’agir et l’adaptation. Chez l’être humain, par exemple l’apaisement passe par la présence des autres et, en particulier, par le toucher : un câlin ou une main posée sur l’épaule favorise la libération d’ocytocine, qui réduit l’effet du cortisol, hormone du stress. Inspirés par cette hypothèse dite du stress buffering, les scientifiques ont imaginé un robot doté d’un « état interne » et de besoins propres, dont le comportement est régulé par deux signaux hormonaux artificiels : l’ocytocine et le cortisol. Lorsque son niveau de stress augmente, le robot peut être « rassuré » par le contact, positif ou négatif, de son partenaire humain.
L’idée est que ce modèle bio-inspiré rende l’interaction plus naturelle : comme avec une personne, le robot traverse une situation difficile et adapte son comportement en conséquence. Le robot n’est donc plus seulement un outil qui exécute des tâches, mais un partenaire social avec lequel il est possible d’établir une relation significative.
La prochaine étape est de tester cette architecture en interaction réelle avec des participants, pour comprendre comment différents gestes et attitudes influencent la dynamique du robot et la qualité de l’échange. Cette recherche, à la croisée de la psychologie et de la robotique, ouvre la voie à des robots capables de s’intégrer dans notre société de manière plus fluide et respectueuse, en favorisant des interactions empathiques et conscientes.
Lorenzo Aloe, doctorant en robotique et neurosciences à ETIS, a présenté un poster lors de la conférence ICDL 2025 à Prague, ⟨hal-05279420⟩
En savoir plus
Aloe, L., Anzalone, S., Zibetti, E., & Cañamero, L. (2025). Touch as a Stress Buffer: A Bio-Inspired Robot Model for Adaptive Social Interaction Based on Hormone Regulation. In Proceedings of the ICDL Workshop on Architecting Intelligence: Exploring Intersections in Cognitive Robotics and Developmental Learning. IEEE.
Zibetti, E., Waheed Palmer, S., Stower, R., Anzalone, S.M. (2025 in press) Emotionally Expressive Robots: Implications for Children’s Behavior toward Robot. In Proceedings of the 34st IEEE International Conference on Robot and Human Interactive Communication (RO-MAN)
Other Actualités